 Products Home / Controllers / Piezo / Strain Gauge Controllers / 150 V USB Closed-Loop Piezo Controllers
Products Home / Controllers / Piezo / Strain Gauge Controllers / 150 V USB Closed-Loop Piezo Controllers150 V USB Closed-Loop Piezo Controllers
- 1-Channel and 3-Channel Options
- Selectable High-Power Drive Outputs
- Front Panel Controls
BPC303
BPC301
Full Suite of Software Support Tools Available








Please Wait
| Benchtop Motion Controllers |
|---|
| 1- and 2-Channel Brushless DC Servo Controllers |
| 1-, 2-, and 3-Channel Stepper Motor Controllers |
| 1- and 3-Channel Open Loop Piezo Controllers |
| 1- and 3-Channel Closed Loop Piezo Controllers |
| 2-Channel NanoTrak® Auto-Alignment Controller |

Click to Enlarge
Figure 1.1 BPC301

Click to Enlarge
Figure 1.2 BPC301 Rear Panel
Features
- Variable Output Selection: 75 V, 100 V, or 150 V
- Closed-Loop PID with Advanced Control Algorithm
- Strain Gauge or Capacitive Sensor Feedback Options
- High-Resolution Position Control for Very Fine Positioning Applications
- Voltage Ramp/Waveform Generation Capability for Scanning Applications
- High Bandwidth (10 kHz) Piezo Positioning
- Auto-Configure Function for Thorlabs Ident-Equipped Piezo Actuators
- User-Controlled Digital I/O Port
- USB Plug-and-Play – Multiaxis Expansion
- Motor Control I/O Port (Jogging, Interlocks)
- Two Full Software Control Suites (See the Kinesis and XA Software Tab for Details)
- Software Compatible with Other Controllers for Integrated Systems Development
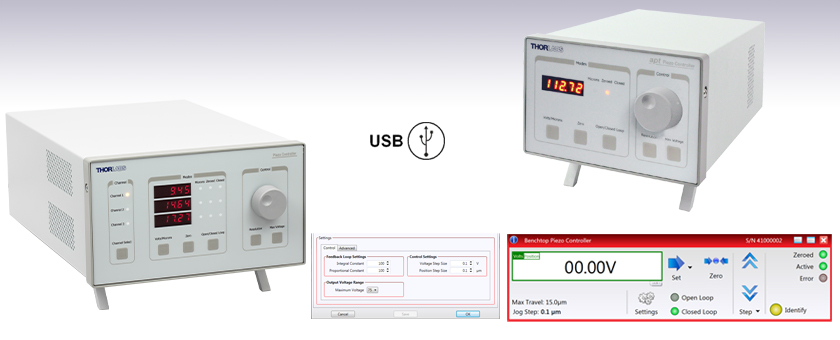
These single- and 3-channel, high-power (150 V) benchtop piezo controllers provide open- or closed-loop nanometer position control. They have been designed to drive our full range of open- and closed-loop piezo-equipped nanopositioning actuators and stages. In addition, flexible software settings make these units highly configurable and therefore suitable for driving a wide range of third-party piezo elements. A waveform generation capability combined with triggering outputs make these units particularly suitable for piezo scanning applications.
Manual controls are located on the front face of the unit to allow manual adjustment of the piezo position using the digitally encoded adjustment pot. The display is easy to read and can be set to show either applied voltage or position in microns. Open- or closed-loop control and zeroing of the piezo can also be selected from the front panel.
USB connectivity provides easy plug-and-play PC operation. Multiple units can be connected to a single PC via standard USB hub technology for multi-axis motion control applications. Coupling this with our Kinesis or XA software applications allows the unit to get up and running quickly. Advanced custom motion control applications and sequences are also possible using the extensive programming environments in both software packages. Please see the Kinesis and XA Software and Kinesis Tutorials tabs for more details.
Cabling
Cables for connecting actuators or stages to the controller are shipped with the actuators or stages, not the controller. If you need help identifying the appropriate replacement cable, please contact Tech Support.
| Other Piezo Driver Controllers | |||
|---|---|---|---|
| K-Cube® Single-Channel Controller and Strain Gauge Reader | Open Loop Benchtop Controller 1- and 3-Channel |
Closed Loop Benchtop Controller 1- and 3-Channel |
Modular 2-Channel Rack System Module |
Specifications (Per Channel)
| Item # | BPC301 | BPC303 |
|---|---|---|
| Piezoelectric Output (SMC Male) | ||
| Voltage (Software Control) | 75 V, 100 V, or 150 VDC | |
| Current | 500 mA Continuous (Max) | 1 A Continuous (Max) |
| Stability | 100 ppm Over 24 Hours (After 30 min Warm-Up Time) | |
| Noise | <3 mV RMS | |
| Piezo Capacitance | 1 to 10 µF (Typical) | |
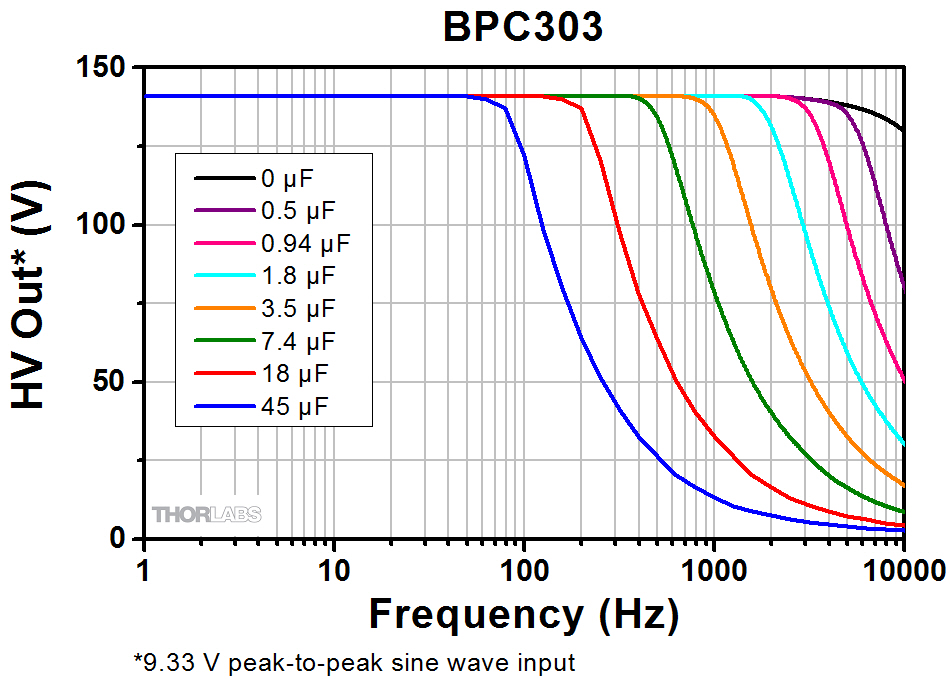
| Bandwidth | 10 kHz (1 µF Load, 1 Vp-p) | |
| External Input (BNC) | ||
| Input Type | Differential or Single Ended | |
| Input Voltage for Full Range (i.e. 75 V, 100 V or 150 V) |
10 V ±2% | |
| Max Output | 75 V Range: -10V to 90 V DC 100 V Range: -10V to 115 V DC 150 V Range: -10 V to 159 V DC |
|
| Position Feedback (PIEZO IN) (9-Pin D-Type Female) | ||
| Feedback Transducer Typea | Strain Gauge or Capacitive Sensor | |
| Detection Method | AC Bridge (18 kHz Excitation) | |
| Typical Resolution | 5 nm (for 20 µm Actuator e.g., PAZ005) | |
| Auto Configure | Identification Resistor or Stage ID EEPROM in Actuator | |
| User Input/Output (AUX IO) (15-Pin D-Type Female) | ||
| 4 Digital Inputs | TTL Levels | |
| 4 Digital Outputs | Open Collector | |
| Trigger Input/Output | TTL | |
| Trigger Input Functionality | Triggered Voltage Ramps/Waveforms | |
| Trigger Output Functionality | Trigger Generation During Voltage Ramp Output | |
| User 5 V (with Ground) | 250 mA (Max) | |
Specifications (Main Unit)
| Item # | BPC301 | BPC303 |
|---|---|---|
| Front Panel Controls | ||
| Display | 5-Digit, 7-Segment | |
| Buttons | Channel Select, Volts/Microns Select, Open/Closed Loop Select, Zero, Resolution, Max Voltage |
|
| Display Brightness | Adjustable | |
| Resolution | Switchable Coarse and Fine Adjustment | |
| Output | Infinite Turn Precision Digital Potentiometer (Encoder) | |
| USB Port | Version 2.0 Full Speed Compatible | |
| Input Power Requirements | ||
| Voltage | 85 - 264 VAC | |
| Power | 150 VA | 250 VA |
| Fuse | 3.15 A | 3.15 A |
| General | ||
| Housing Dimensions (W x D x H) | 152 mm x 244 mm x 104 mm (6" x 9.6" x 4.1") |
240 mm x 360 mm x 133 mm (9.5" x 14.2" x 5.2") |
| Weight | 3.18 kg (7 lbs) | 6.7 kg (14.75 lbs) |
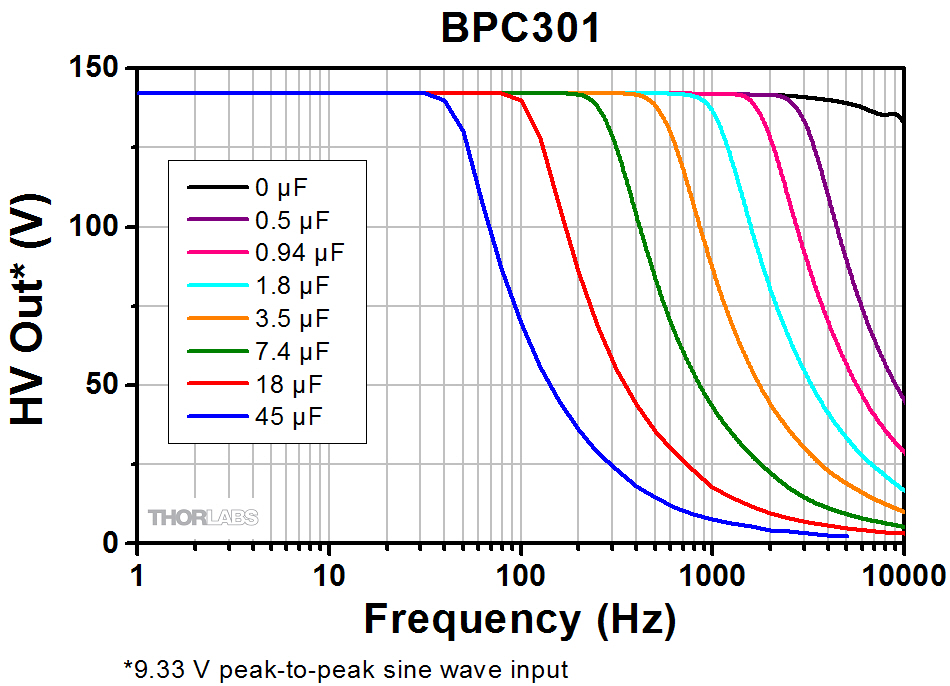
The graphs below show the drive voltage/frequency response at different capacitive loads for the BPC301 and BPC303.
Click to Enlarge
Click Here for Raw Data
Click to Enlarge
Click Here for Raw Data
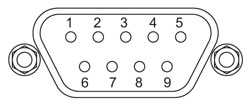
Piezo In
D-Type Female
| Pin | Description | Pin | Description | Pin | Description |
|---|---|---|---|---|---|
| 1 | Strain Gauge Excitation | 4 | Ground | 7 | Actuator ID Signalb |
| 2 | +15 V Outa | 5 | AC Feedback In | 8 | Reserved for Future Use |
| 3 | -15 V Outa | 6 | Ground | 9 | Reserved for Future Use |
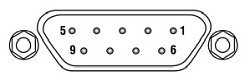
Interconnect
D-Type Male
| Pin | Description | Pin | Description | Pin | Description |
|---|---|---|---|---|---|
| 1 | Not Connected | 4 | Not Connected | 7 | Not Connected |
| 2 | RX (Controller Input) | 5 | Ground | 8 | Not Connected |
| 3 | TX (Controller Output) | 6 | Not Connected | 9 | Not Connected |
AUX I/O
D-Type Female
| Pin | Description | Return | Pin | Description | Return | Pin | Description | Return |
|---|---|---|---|---|---|---|---|---|
| 1 | DIG O/P 1 | 5, 9, 10 | 6 | DIG I/P 1 | 5, 9, 10 | 11 | For Future Use (Trigger OUT) | 5, 9, 10 |
| 2 | DIG O/P 2 | 5, 9, 10 | 7 | DIG I/P 2 | 5, 9, 10 | 12 | For Future Use (Trigger IN) | 5, 9, 10 |
| 3 | DIG O/P 3 | 5, 9, 10 | 8 | DIG I/P 3 | 5, 9, 10 | 13 | DIG I/P 4 | 5, 9, 10 |
| 4 | DIG O/P 4 | 5, 9, 10 | 9 | DIG Ground | - | 14 | 5 V Supply Output | 5, 9, 10 |
| 5 | DIG Ground | - | 10 | DIG Ground | - | 15 | 5 V Supply Output | 5, 9, 10 |
Handset In
| Pin | Description | Pin | Description |
|---|---|---|---|
| 1 | RX (Controller Input) | 4 | +5 V, 100 mA Supply for Joystick |
| 2 | Ground | 5 | TX (Controller Output) |
| 3 | Ground | 6 | Ground |
USB
B-Type Female
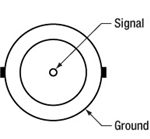
HV Out
Male SMC

Output Voltage: 0 - 150 V
Current: 0 - 500 mA
Trig In and Trig Out
BNC Connectors
Input Trig Voltage: 0 - 7 V DC
Output Trig Voltage: 0 - 5 V DC
EXT In (+) and EXT In (-)
BNC Female
Input Voltage: 0 - 10 V
Input Impedance: 20 kΩ
Piezo Driver Bandwidth Tutorial
Knowing the rate at which a piezo is capable of changing lengths is essential in many high-speed applications. The bandwidth of a piezo controller and stack can be estimated if the following is known:
- The maximum amount of current the controllers can produce. This is 0.5 A for our BPC Series Piezo Controllers, which is the driver used in the examples below.
- The load capacitance of the piezo. The higher the capacitance, the slower the system.
- The desired signal amplitude (V), which determines the length that the piezo extends.
- The absolute maximum bandwidth of the driver, which is independent of the load being driven.
To drive the output capacitor, current is needed to charge it and to discharge it. The change in charge, dV/dt, is called the slew rate. The larger the capacitance, the more current needed:

For example, if a 100 µm stack with a capacitance of 20 µF is being driven by a BPC Series piezo controller with a maximum current of 0.5 A, the slew rate is given by

Hence, for an instantaneous voltage change from 0 V to 75 V, it would take 3 ms for the output voltage to reach 75 V.
Note: For these calculations, it is assumed that the absolute maximum bandwidth of the driver is much higher than the bandwidths calculated, and thus, driver bandwidth is not a limiting factor. Also please note that these calculations only apply for open-loop systems. In closed-loop mode, the slow response of the feedback loop puts another limit on the bandwidth.
Sinusoidal Signal
Click to Enlarge
Figure 102A Piezo Driver Sine Signal
The bandwidth of the system usually refers to the system's response to a sinusoidal signal of a given amplitude. For a piezo element driven by a sinusoidal signal of peak amplitude A, peak-to-peak voltage Vpp, and frequency f, we have:

A diagram of voltage as a function of time is shown in Figure 102A. The maximum slew rate, or voltage change, is reached at t = 2nπ, (n=0, 1, 2,...) at point a in Figure 102A:

From Equation 1:

Thus,
For the example above, the maximum full-range (75 V) bandwidth would be
 .
.
For a smaller piezo stack with 10 times lower capacitance, the results would be 10 times better, or about 1060 Hz. Or, if the peak-to-peak signal is reduced to 7.5 V (10% max amplitude) with the 100 µm stack, again, the result would be 10 times better at about 1060 Hz.

Click to Enlarge
Figure 102B Piezo Driver Triangle Wave Signal
Triangle Wave Signal
For a piezo actuator driven by a triangle wave of max voltage Vpeak and minimum voltage of 0, the slew rate is equal to the slope:
 .
.
Or, since f = 1/T:

Click to Enlarge
Figure 102C Piezo Driver Square Wave Signal
Square Wave Signal
For a piezo actuator driven by a square wave of maximum voltage Vpeak and minimum voltage 0, the slew rate limits the minimum rise and fall times. In this case, the slew rate is equal to the slope while the signal is rising or falling. If tr is the minimum rise time, then

or
 .
.
For additional information about piezo theory and operation, see the Piezoelectric Tutorials page.
Software
Kinesis Version 1.14.58
XA Version 1.6.0
The Kinesis and XA Software Packages, which include a GUI for control of Thorlabs' motion controllers.
Also Available:
- Firmware Update Utilities
- Communications Protocol
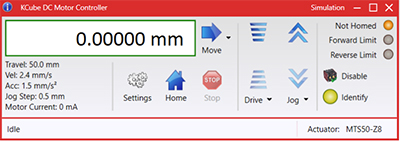
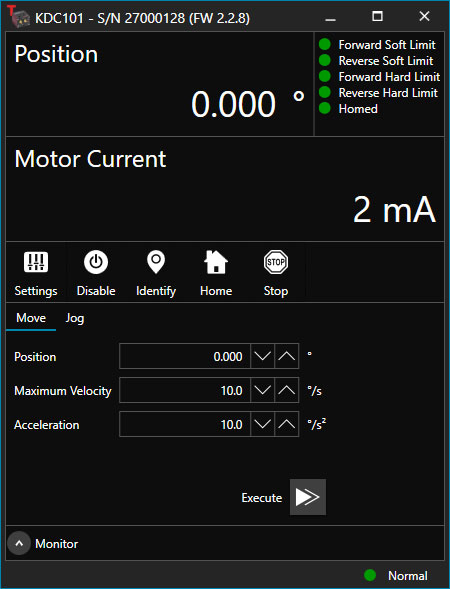
Figure 789A Kinesis GUI Screen
Thorlabs offers two platforms to drive our wide range of motion controllers: our XA software package and our Kinesis software package, which is being phased out. The Kinesis software supports most of Thorlabs' motion control products. The XA software is an improved platform for developers that currently supports some of our most popular motion control products (see the full list of supported products here). The software is undergoing continuous, intensive development and will eventually add support for our entire line of motion control products. The XA software application will be fully supported through the year 2040.
Kinesis Motion Control Software
The Kinesis software features .NET controls which can be used by 3rd party developers working in the latest C#, Visual Basic, LabVIEW™, or any .NET compatible languages to create custom applications. Low-level DLL libraries are included for applications not expected to use the .NET framework. A Central Sequence Manager supports integration and synchronization of all Thorlabs motion control hardware.
By providing a common software platform, Thorlabs has ensured that users can easily mix and match any of the Kinesis controllers in a single application, while only having to learn a single set of software tools. In this way, it is perfectly feasible to combine any of the controllers from single-axis to multi-axis systems and control all from a single, PC-based unified software interface.
Click to Enlarge
Figure 789B XA GUI for KDC101 Brushed DC Servo Controller
The software package allows two methods of usage: graphical user interface (GUI) utilities for direct interaction with and control of the controllers out of the box, and a set of programming interfaces that allow custom-integrated positioning and alignment solutions to be easily programmed in the development language of choice.
XA Motion Control Software: Improved Platform for Developers
Designed from the ground up to be straightforward to understand, XA provides a thread-safe and language-paradigm-agnostic set of application programming interfaces in C, C++, and C#/.NET with language wrappers available to allow for easy integration into your native, .NET language, Python, or LabVIEW applications. This enables the same functionality as mentioned for the Kinesis software development kit (SDK) while providing a more streamlined toolkit for developers. Coupled with the included developer guides and code examples in the SDK, this software is tailored toward users interested in creating complex, customized applications and interfaces. Full API documentation is provided for the native C library, and the .NET wrapper documentation is currently under development. Please contact Tech Support for more details on using the .NET wrapper.
XA also features a comparable GUI to Kinesis while adding improvements to the user experience, like the ability to save device states and a more consistent interface across devices of different types. In addition, further improvements are planned as XA will be fully supported through the year 2040, whereas the Kinesis software is being phased out. The current version of the XA software can only drive select Thorlabs motion controllers. However, the software is undergoing continuous, intensive development and will eventually add support for our entire line of motion control products. Information on software compatibility can be found in the XA User Guide, and additional details about the software, including a list of compatible devices, can be found here.
Thorlabs' Kinesis software features new .NET controls which can be used by third-party developers working in the latest C#, Visual Basic, LabVIEW™, or any .NET compatible languages to create custom applications.
C#
This programming language is designed to allow multiple programming paradigms, or languages, to be used, thus allowing for complex problems to be solved in an easy or efficient manner. It encompasses typing, imperative, declarative, functional, generic, object-oriented, and component-oriented programming. By providing functionality with this common software platform, Thorlabs has ensured that users can easily mix and match any of the Kinesis controllers in a single application, while only having to learn a single set of software tools. In this way, it is perfectly feasible to combine any of the controllers from the low-powered, single-axis to the high-powered, multi-axis systems and control all from a single, PC-based unified software interface.
The Kinesis System Software allows two methods of usage: graphical user interface (GUI) utilities for direct interaction and control of the controllers 'out of the box', and a set of programming interfaces that allow custom-integrated positioning and alignment solutions to be easily programmed in the development language of choice.
For a collection of example projects that can be compiled and run to demonstrate the different ways in which developers can build on the Kinesis motion control libraries, click on the links below. Please note that a separate integrated development environment (IDE) (e.g., Microsoft Visual Studio) will be required to execute the Quick Start examples. The C# example projects can be executed using the included .NET controls in the Kinesis software package (see the Kinesis Software tab for details).
 |
Click Here for the Kinesis with C# Quick Start Guide Click Here for C# Example Projects Click Here for Quick Start Device Control Examples |
|
LabVIEW
LabVIEW can be used to communicate with any Kinesis-based controller via .NET controls. In LabVIEW, you build a user interface, known as a front panel, with a set of tools and objects and then add code using graphical representations of functions to control the front panel objects. The LabVIEW tutorial, provided below, provides some information on using the .NET controls to create control GUIs for Kinesis-driven devices within LabVIEW. It includes an overview with basic information about using controllers in LabVIEW and explains the setup procedure that needs to be completed before using a LabVIEW GUI to operate a device.
 |
Click Here to View the LabVIEW Guide Click Here to View the Kinesis with LabVIEW Overview Page |
|
| Posted Comments: | |
user
(posted 2025-03-31 12:34:47.297) Hello, I'm using the BPC303 with Kinesis, and from the paragraph 4.6 of the manual, the GUI should be able to show the position of the sensor even in open loop (and vice versa the voltage in closed loop).
However, the software shows the position only transiently, then reverts to showing the voltage (and vice versa). What is going on? dnewnham
(posted 2025-11-10 09:42:42.0) Thank you for your inquiry I will contact you directly to discuss your issue gloria hoefler
(posted 2024-02-09 16:07:14.18) We have ordered a BPC303 controller, I do not readily find on the manual an optical input for the OPM to close the loop (while performing fiber alignement) do'neill
(posted 2024-02-26 04:11:55.0) Thank you for reaching out. The BPC series does not have an optical input, there are a couple of options, you could use the BPC303's EXT in ports to provide a 0-10V signal, or our BNT001 controller has an optical input and is designed for tracking applications. I will reach out to you directly to discuss this with you. Daiki Matsubayashi
(posted 2023-11-03 17:21:10.227) Hi, I am using BPC303 with APT user. After one to two hours of use, the Event Infomation panel suddenly appears. The Event Infomation Panel shows Type [Code]:
Internal Code: 16240903
Description: Hardware Notification/Response
Note: A notification or response message has been received from a hardware unit. This may be indicative of a hardware fault or illegal command/parameter sent to the hardware.
Extra Info: Hardware response code 32785 ((+15V Under Limit)) received from hardware unit
SN 71810940 (in response to message ident 0). .
If this event appears, does it need to be repaired or dealt with in any way? do'neill
(posted 2023-11-10 04:14:38.0) Response from Daniel at Thorlabs. I am sorry to hear this, I will reach out to you directly to troubleshoot this issue and discuss possible next steps. Ran Zhu
(posted 2023-10-19 16:10:29.73) Hi, could you please let me know the resolution of the output voltage? I see only the resolution of the controlled size. Thanks. do'neill
(posted 2024-02-09 05:58:18.0) Thank you for reaching out. The theoretical open loop resolution of the BPC300 series is 1/32767 of the voltage range. So for the 105V range it is ~4mV and for the 75V range it is ~2mV. This is a theoretical value for the resolution and not achievable as the voltage noise in the BPC300 range is higher than this (approximately 12mVpp). I will reach out to you directly to discuss this with you. user
(posted 2023-04-05 19:36:53.19) Hi. I want to set up closed-loop system using BPC 301 to actuate PAZ005 in ~5um displacement and several hundreds of Hz frequency. Will it be enough with two products(BPC301 and PAZ005)? Can I see the real time displacement in computer using APT or Kinesis? Steve Andrews
(posted 2022-03-09 04:17:04.673) Kinesis Version 1.14.31doesn't seem to allow enabling of external voltage inputs to BPC301 that is possible with APT software or am I missing something? DJayasuriya
(posted 2022-03-10 05:19:23.0) Thank you for your inquiry. Using the XT IN (+) and EXT IN (-) (BNC connector) allows a 0V to 10V input to drive the output to its full scale. This gives a gain of 7.5 on the 75V range, 10 on the 100V range and 15 on the 150V range. Using Kinesis BPC advance settings you have the option to choose the input source as external signal. Please connect our tech support team if you do have any future questions, we would be happy to help. user
(posted 2022-02-10 09:29:57.617) Hi, I would like to set up a BPC303 as well as a NanoTrak TNA001 to be controlled using Thorlabs APT ActiveX Control in MATLAB. Although I am able to connect to the devices and call some "methods" commands to control them (like SetPosOutput or similar) as expected, the programming manual of yours is still not thorough enough to allow all methods to be called, especially the 'Get...' commands. Could you please provide a more detailed programming guide for MATLAB users, including at least what the arguments stand for and the corresponding Example Code as well? cstroud
(posted 2025-01-29 11:30:58.0) Thank you for reaching out. Unfortunately, we do not have an example with this particular controller. We have contacted you directly to help set up your application. Christian Schmiegelow
(posted 2021-12-04 12:13:43.857) Hi. I am setting up a BCP303 to be controlled from C++ with the kinesis libraries. I have already connected and can control the device correctly and as expected.
I am curious about the importance of using the polling feature with the StartPolling and StopPolling commands. I am not sure what it brings. I seem be be able to command and read info from the device with and without it.
Any help is well received. cwright
(posted 2021-12-07 05:32:03.0) Response from Charles at Thorlabs: Thank you for your query. The Polling commands will make the controller send out a series of periodic status updates so you do not need to manually ask for this update. It is just another way of doing it. IkHwan Kwon
(posted 2021-12-01 20:55:48.65) To Thorlabs.
Hello, I have a problem for using BPC301 with Software package (Kinesis version : 1.14.30, APT version : 3.21.5)
1. Kinesis C++ example of benchtop peizo has "Access violation" from PBC_Close function
2. APT activeX control doesn't present in Visual studio 2015, 2017,2019 MFC programming. cwright
(posted 2021-12-08 10:46:49.0) Response from Charles at Thorlabs: Thank you for your query. We will reach out to you to discuss your code and help with troubleshooting. Alejandro Grine
(posted 2021-09-01 17:13:16.23) Please include cables with the controller next time! What a pain to pay good money for a controller only to realize that the necessary cables to hook it up to the stage are not included. At the very least, make it clear on the website that the cables are not included! cwright
(posted 2021-09-02 08:32:05.0) Response from Charles at Thorlabs: Thank you for your query. The cables are supplied with the stages such that regardless of the number of stages in the customers possession, there will always be the correct number of suitable cables. We will reach out to you to find out what stage you are using and if you received cables suitable cables with it. Sam Quan
(posted 2021-09-01 10:50:07.693) Dear Thorlabs,
we use BPC303 as lens align controller as below:
1. set InputSource to "ExternalSignal"
2. manual changed the external voltage to set the wanna position
3. set InputSource to "SoftwareOnly"
4. software auto set the postion to optimized the wanna position
when set the InputSource from "ExternalSignal" to "SoftwareOnly",the position will changed to zero or other position , this will result in the start point of software auto optimized is not the point we want, is there any method can let the position not changed when set InputSource from "ExternalSignal" to "SoftwareOnly" cwright
(posted 2021-09-03 06:18:06.0) Reponse from Charles at Thorlabs: Thank you for your query. When using the "Software + External Signal" option the voltage applied will be the sum of that demanded by both the external input and the software. When you switch to "Software Only" the external input would be ignored but you can keep the external input while using software control. Alternatively if you are writing your own software you could read the voltage before changing the input source settings. Then once you change the source have the old value automatically applied by the software prior to your optimisation. We will reach out to you to discuss your application. user
(posted 2020-10-14 17:35:59.51) Excuse me,could i change the output voltage frequency when i use the BPC301, and output a high frequency voltage? cwright
(posted 2020-10-14 08:23:59.0) Response from Charles at Thorlabs: Hello and thank you for contacting us. The output voltage (open loop) or position of the piezo actuator(closed loop) can be controlled from an external source via the EXT IN (+) and EXT IN (-) BNC connectors on the rear panel. The exact bandwidth achievable is dependent on a variety of factors, such as the load capacitance but in general is a few kHz in open loop mode and about 200 Hz in closed loop.
For more details on configuring the EXT IN connections please see section 3.3 of the manual and the Piezo Bandwidth tutorial on the website:
https://www.thorlabs.com/NewGroupPage9.cfm?ObjectGroup_ID=1912&tabname=Piezo%20Bandwidth agarciat
(posted 2017-09-08 14:07:34.203) Dear Thorlabs. We have got your BPC 301 controller . The problem is that the controller does not change the voltage and the position neither by the front panel nor by the software.I keep getting an internal error#16510403/Error; [Code=1252] power supply error. The front panel shows 0.60V and when turned onto closed it continues to oscillate +/-0.05 or so. As it oscillates, in the APT User window I get a new window every second with the same error. How do I increase the voltage? Please advise on possible solution. bwood
(posted 2017-09-26 04:37:04.0) Response from Ben at Thorlabs: I am sorry to hear about your issues here. I believe this may be a fault with your device, and we will be in contact to troubleshoot this issue further. jedd
(posted 2017-08-11 12:23:55.113) Is it possible to use this PZT controller to specify applied force over time instead of displacement over time? bwood
(posted 2017-08-18 05:17:13.0) Response from Ben at Thorlabs: Thank you for your question. The BPC has a force sensing mode, based on the the strain gauge feedback. You can configure the device for this in APT/Kinesis. One example of this functionality is with the FSC102. There is no way to directly output the force output by the piezo, but you could calculate it, see the piezo tutorial here: https://www.thorlabs.com/newgrouppage9.cfm?objectgroup_id=5030 user
(posted 2016-04-13 12:48:12.44) Is it possible to use this controller in closed loop (piezo stage+strain gauge) to eliminate hysteresis and at the same scan the stage with an external function generator? besembeson
(posted 2016-04-14 01:41:46.0) Response from Bweh at Thorlabs USA: Yes this is possible. Note that the bandwidth will be lower under this condition. g.w.steen
(posted 2015-07-23 09:02:01.35) While the controller works perfectly fine manual and with the delivered APT software, we have some difficulties using Labview. The correct ActiveX control for the ThorLabs BPC303 APT Piezo Contoller is used ('MGPiezo') and we used the SN given by the APT software. The Labview is configured as given by examples files. However still Labview returnes the error: "Control HW Communications Disabled
"
We also try selecting user interface as preferred execution stystem under File >> VI Properties >>Execution tab. Are we missing something obvious? msoulby
(posted 2015-07-28 07:01:10.0) Response from Mike at Thorlabs: We will contact you directly to trouble shoot your problem further. sylvain.girard
(posted 2014-12-05 12:30:14.847) I am currently using a BPC 203 controller with Nanomax 311 and also with APB 301 translation stages. However, I would like to purchase a new 3 axis translation stage with larger scale (and possibly a better linearity). No piezo stage with large range are available anymore in Thorlabs catalogue (with a dynamic range up to 100-300µm). Therefore, I wonder if it would be possible to use third party translation stages (for example from PI or PiezoJena or others...) while keeping the Thorlabs controller beacause I already spend a lot of time developping LabVIEW software for BPC203 controller. If I need a BPC303 (150V) that could be possible... msoulby
(posted 2014-12-08 03:52:54.0) Response from Mike at Thorlabs: At this time Thorlabs does not have a 3 axis stage with 100-300um of piezo travel. However there is no reason why the controller would not work with a third party piezo providing the piezo falls within the drive voltage specification of the controller, which is 0-75V and 500mA per channel for the BPC203. However please bear in mind that Thorlabs piezo stages that have strain gauge feedback use an auto ID resistor to tell the controller how much travel the piezo stack has and selects the correct voltage range accordingly (not applicable to open loop control and piezos) this may not be available on a third party stage so it may need to be configured manually. Also as any thir party stage will not have been tested by Thorlabs we would be unable to guarantee the stage will operate to the spec that the competitor claims and would not be responsible for any damage caused by using such a third party stage. palmada
(posted 2013-01-28 02:39:04.603) Hello, we are interested in getting this controller to drive the piezos on the nanoMax300. Will this work with MicroManager 64bits?
Best,
Pedro Almada jlow
(posted 2013-01-18 12:25:00.0) Response from Jeremy at Thorlabs: We do not have a comprehensive tutorial for VB 2010 at the moment. I will get in touch with you directly with some instructions and screenshots on using the APT software with VB 2010. branderson
(posted 2013-01-18 10:30:57.933) Hi, I have a BPC301 and have been using labview to run it, but would now like to use visual basic. We have VB 2010, which is way different than VB6 so the tutorial isn't very helpful. Do you have updated programming instructions for use with VB 2010? tcohen
(posted 2012-10-04 15:45:00.0) Response from Tim at Thorlabs to Diego: Thank you for contacting us. We have a variety of 50mm travel stages. One example which may be of interest to you is the LNR50SE. This stage utilizes a submicron resolution optical encoder to provide a direct readout of the absolute position. I will contact you directly to discuss your application in more depth. jlow
(posted 2012-09-27 09:13:00.0) Response from Jeremy at Thorlabs: We will get in contact with you directly on troubleshooting this. dgiraldo
(posted 2012-09-26 21:54:13.0) Dear ThorLabs:
I would like to get info about a XY stage (50 mm travel), with the maximun accuracy (nm), I will use the stage to measure parts metalic or plastic, I am offering dimensional metrology services in Costa Rica and I will like offer to my customers the maximun accuracy into a micron.
I need to get the value of the stage trace in mm, micron, or nm oirectly to my PC!! Is it possible?
Rgds,
Diego Giraldo
METRIX
Costa Rica leonid_krivitskiy
(posted 2012-09-21 03:00:19.0) Dear Thorlabs. We have got your BPC 203 controller along with the Nanomax TS stage. The problem is that channel no.1 of the controller does not change the voltage and the position neither by the front panel nor by the software. The front panal shows -12.3 V irrespective of the position of turning knob and the zeroing button. Other two channels are okay. Please advise on possible solution. jjurado
(posted 2011-06-15 09:02:00.0) Response from Javier at Thorlabs to last poster: Thank you very much for your feedback. We have added the piezo drive cables as related products to the pages for the BPC controllers and the NanoMax stages. We will also add a information on the Features section of these products to make it clear that the drive cables are not included with the controller, but are included with the stages. Please contact us at techsupport@thorlabs.com if you have any further questions or comments. user
(posted 2011-06-14 10:18:32.0) It would be useful to add the drive/feedback cables as a related product for either this page or the NanoMax pages. As of now, it is very unclear as to whether these are included with the controller, the stage, or not at all. apalmentieri
(posted 2010-03-03 10:41:09.0) A response to sylvain from Adam at Thorlabs: We have already responded to you via email, but wanted to update the response on our website as well. Since this feedback, We have looked into our supply of USB cables and have insured that they are all certified high speed USB cables. Currently, we do not have a complete software solution for non Active X users, but we do offer a low level comms protocol document for customer that want to program their own non Active X based software. We expect to add the piezo protocols to this document in the upcoming weeks. sylvain.girard
(posted 2009-11-21 08:01:10.0) I recently start using BPC203 with MAX313 to control scanning near field microscope and i have two comments:
- first, the USB port of the controllers needs good quality USB A/USB B cable to avoid problems (I spent few times to discover that some troubles in the communication were due to the cable...)
- it is sad that Thorlabs could not provide solutions other than Active X for programmers who prefer to develop their codes under Linux. Any solutions in this case??
Best regards klee
(posted 2009-07-17 15:17:54.0) A response from Ken at Thorlabs to noah: We do have some tutorial videos on APT Programming using Visual Basic. Simply click on the Video Tutorials tab on this page, click "here", then click on APT programming. noah
(posted 2009-07-17 13:40:12.0) Hi, I am new to visual basic, though I have extensive programming experience in other languages. I am having trouble writing vb6 code to control my BPC202 and my BPS 103. Structuring the code and calling procedures from the included libraries to create timing-sensitive & predictable object-oriented programs is rather difficult in VB, as I find myself having to guess how VB6 will sequentially execute a program, modify variables in "real time" etc.
I would like from you, if possible, a version of the apt-server.hlp file compiled into a printable .pdf or something similar (rather than printing every topic individually). Better yet, a more descriptive yet concise introduction to scientific computing with VB (via Thorlabs APT products) would be a lifesaver.
It would also be great if you had a repository of code that users could submit to and draw from as a learning tool; even if the code were not checked for bugs or vouched for by Thorlabs, it might help to see how others structure their programs.
Any old help files or internally developed VB code snippets (the included examples are a good start) that youd be willing to share with me would be great, too. Laurie
(posted 2009-02-05 17:18:02.0) Response from Laurie at Thorlabs to melsscal: Thank you for your interest in our BPC203 controller. To control the piezos on the MAX313/M, you can use the BPC203 controller. Other options include the BNT001 and the TPZ001. Please let us know if you have additional questions. melsscal
(posted 2009-02-05 03:47:58.0) Can we use BPC203 with MAX313/M as Non Track Controller ? acable
(posted 2007-10-18 07:47:11.0) PHS101 remote control device is missing from this presenation (not even posted as a related product), i would add this right into the current presentation in summary with a link to the PHS01 product page. Ideally i would like to be able to order both products from this page. |

 Zoom
Zoom- Open- or Closed-Loop Nanometer Position Control
- Interfaces with Computer Using USB Cable
- Full Software GUI Control Suites and Support for Third-Party Custom Applications
These single- and 3-channel, high-power benchtop piezo controllers are designed for use in critical alignment applications where nanometer level motion control is required. Featuring options for either strain gauge or capacitive sensor feedback, these units have been designed to drive our full range of open- and closed-loop piezo-equipped nanopositioning actuators and stages.
Multiple units can be connected to a single PC using standard USB hub technology for multi-axis motion control applications. The units are fully compatible with our Kinesis software package, and an intuitive graphical instrument panel allows immediate control and visualization of the operation of the piezo controller and any other controllers that are installed in the system. The BPC303 is also fully compatible with our XA software. Please see the Kinesis and XA Software and Kinesis Tutorials tab for more information.

 Zoom
Zoom- High-Reliability Joystick Utilizing USB HID Protocol
- Single-Axis Control Via an Encoder Knob
- Two Different Modes for Fast or High-Precision Moves
- Speed Dial for Sensitivity Adjustment
- Allows Remote Manual Control
- Can be Reprogrammed using a PC
- Ergonomic Design
The MJC1 Joystick has been designed to provide intuitive, tactile, manual positioning of our range of piezo-based stages. The joystick features an encoder knob for single axis control, a push button to switch between fast or high-precision movement, and a speed dial to fine tune speed control. For most applications, the default parameter settings saved with the compatible controller allow the joystick to be used out-of-the-box, with no need for further setup, negating the requirement to be connected to a host PC and allowing true remote operation. Furthermore, the parameter settings can be reprogrammed and saved to a paired controller using a PC, so the controller can be disconnected from the computer and remote operation continued.
The MJC1 Joystick is compatible with our BPC30x Series Benchtop Piezo Controllers. The joystick has both a Mini-DIN and a USB Type-C port and is shipped complete with two cables, a 6-pin Mini-DIN plug to plug cable and a USB 3.1 Type-A to Type-C cable, for use with these controllers as well as setups utilizing the USB HID class. For more information about configuring and setting up the joystick over USB HID, please see the manual by clicking on the red Docs icon ( ) below.
) below.